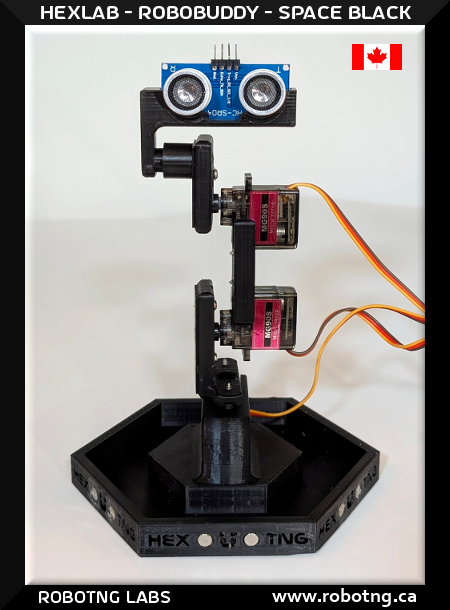
Colorways: Storm Blue · Neutron White · Space Black · Ever Green · Candy Red · Silver Bells
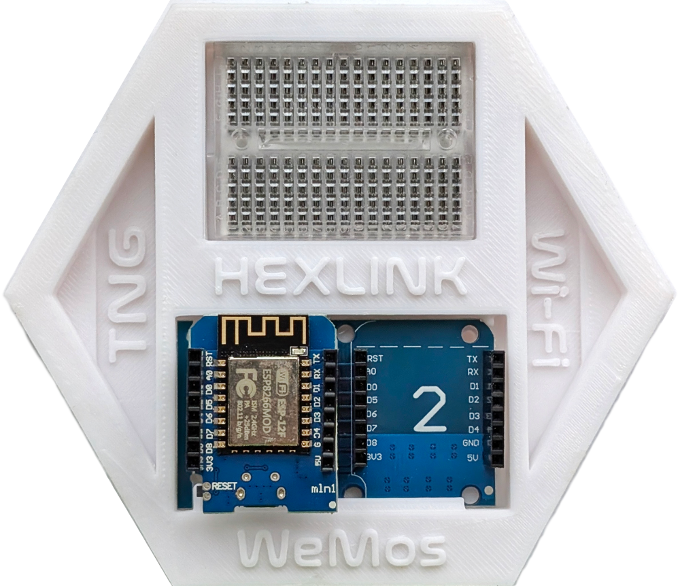
Pin Quick Reference
D4 → GPIO2 (onboard LED, active-low)
D5 → GPIO14 · D6 → GPIO12 · D7 → GPIO13
A0 → Analog in (≤ 3.2 V)
5 V rail for servos/sensors; GND common
MicroPython — Onboard LED (GPIO2)
MicroPython
from machine import Pin
import time
led = Pin(2, Pin.OUT) # D4 (active-low LED)
while True:
led.value(0) # ON
time.sleep(0.5)
led.value(1) # OFF
time.sleep(0.5)
Arduino — External LED (D5)
Arduino
const int LED = 5;
void setup(){ pinMode(LED, OUTPUT); }
void loop(){
digitalWrite(LED, HIGH); delay(500);
digitalWrite(LED, LOW); delay(500);
}
HexLab™ RoboBuddy™
Animatronic Robot Companion
Standalone kit to build, program, and test RoboBuddy™. Modular tops; classroom-friendly; demo-ready.
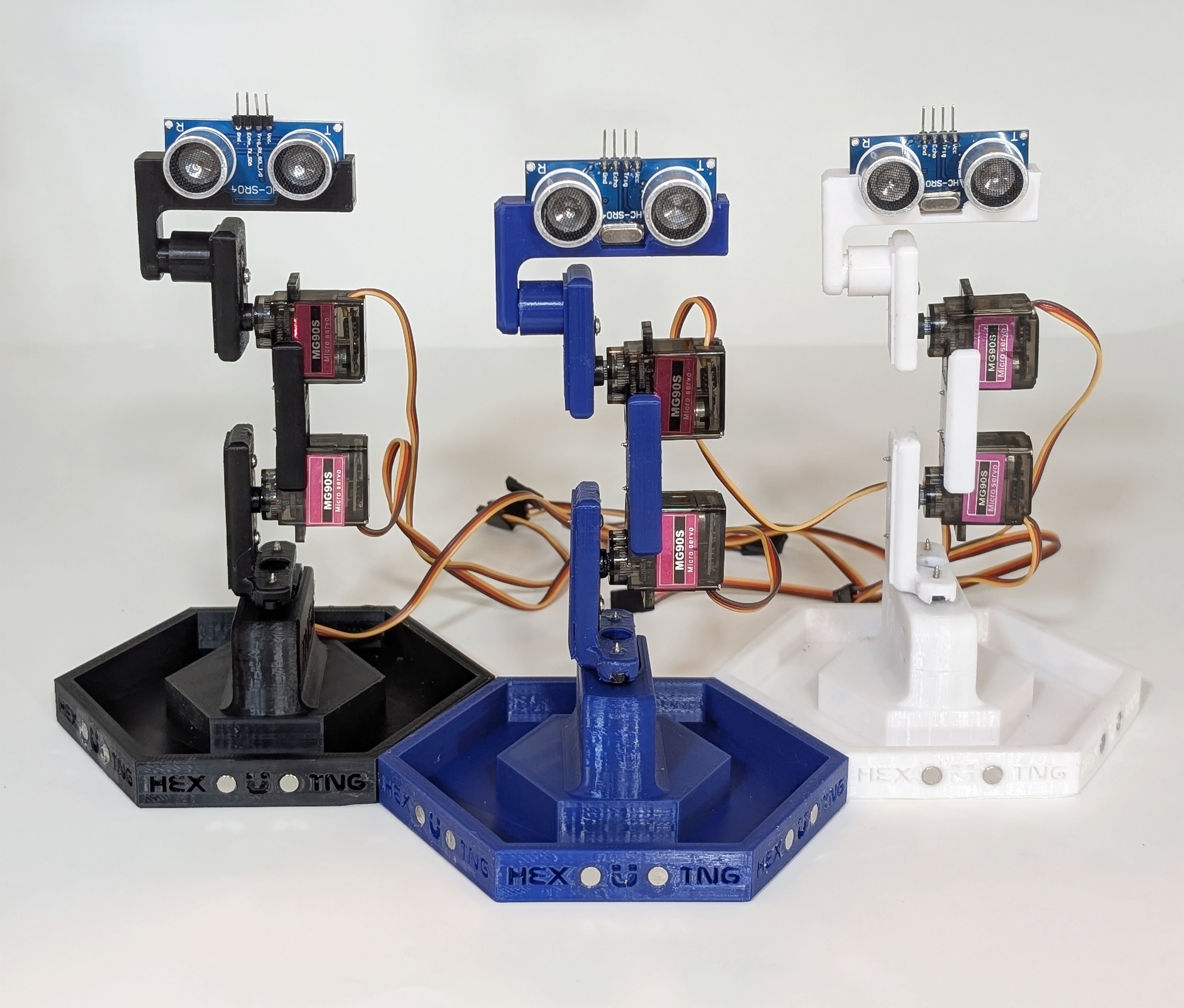
Features
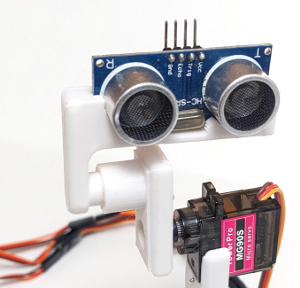
3 × 180° micro servos (MG90S compatible)
Swappable tops: Distance (HC-SR04) / Lighthouse
Programmable reactions via MicroPython (Thonny) or Arduino
Magnetic HexLab™ base; quick teardown for lessons
Pin Map (ESP8266)
Servos → GPIO14 / GPIO12 / GPIO13 (D5 / D6 / D7)
HC-SR04 → Trig = GPIO12 (D6), Echo = GPIO13 (D7)
A0 available for analog experiments (≤ 3.2 V)
MicroPython — Servo Sweep (GPIO14)
MicroPython
from machine import Pin, PWM
import time
servo = PWM(Pin(14), freq=50) # D5
left, right, center = 26, 128, 77
while True:
servo.duty(left); time.sleep(0.6)
servo.duty(right); time.sleep(0.6)
servo.duty(center);time.sleep(0.6)